
【WRC·热点资讯】谈谈马斯克的特斯拉机器人Optimus(擎天柱)
马斯克要造人型机器人Optimus(擎天柱)的舆论从去年开始就被媒体炒得沸沸扬扬。酷炫的有些虚假的机器人宣传视频科幻感十足,更是推动了特斯拉公司的股价一路飙升,今天的发布会自然引起了社会各界的关注。

从今天发布会现场的机器人演示效果看,只能说是“理想很丰满,现实很骨感”。裸露骨感的Optimus机器人原型机缓缓走到台前,只有摆动躯干和手势展示的能力。而后面穿上“衣服”的机器人更初级,只能由几名工程师抬出来扭动几下,从现场马斯克的表情可以感觉出来他内心应该是“尴尬”的。

不过马斯克也多次说到发布会展示的机器人还是原型机,未来几个月还会有大的进步...我想他是有些乐观了,比起Optimus机器人,波士顿动力机器人和Deepmind公司合作的成果应该更值得期待。下面从“下肢运动、上肢操作、智能程度”三个方面简单谈谈马斯克的特斯拉机器人Optimus(擎天柱)的技术现状吧。
1、下肢运动
运动首先要解决驱动问题。马斯克选择自主研制电机驱动的思路是合理的,也是特斯拉公司的强项。日本的阿西莫机器人、波士顿动力机器人、欧洲iCub机器人(maxon电机)、国内优必选机器人、国内达闼机器人都有自主的关键驱动部件。但是从驱动关节到下肢运动能力,特斯拉机器人还是相对落后,阿西莫机器人在平衡运动能力和波士顿动力的超强运动能力显然更为先进。
另外,机器人能源的电池技术和驱动电机结合也是特斯拉的优势。“擎天柱”身体中间有2.3kWh的电池组能支持人形机器人工作一整天。这个电池组的独特之处在于,它把所有的电池电子都集成到了一起,传感器融合电荷管理等,利用汽车和机能源产品将其融合到一起。这也是特斯拉流线型制造的高效之处。
2、上肢操作
特斯拉机器人的仿人手设计应该说很常规。6个主动自由度,11个关节自由度。宣传说既可以完成大口径物体抓取,同时也能满足抓取精巧物体的需求,并搭载了能够驱动手指并进行感知的传感器,但是也没有给出更具体的技术参数。从上肢操作展示看,能力应该很普通。
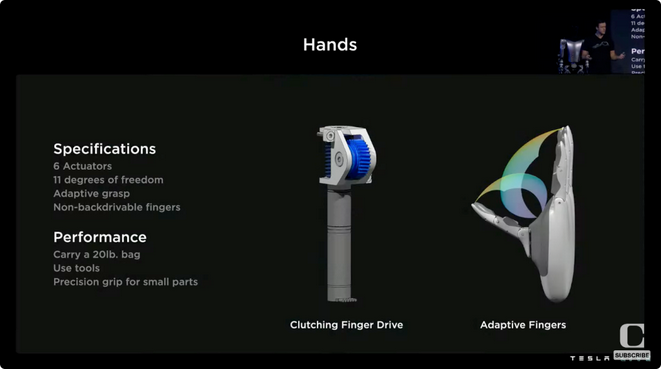
并且上肢手臂操作中重要的末端腕力传感器和触觉传感器,从宣讲会看,马斯克团队还没开始考虑。
3、智能程度
马斯克在宣讲会上多次强调了AI的重要性,称现有机器人都不具备“intelligence”,而这正是学术界一直在努力的方向。目前当前这款Optimus机器人应该更是“弱智”状态,可以从智能感知、智能交互、智能操作三个方面来分析。
(1)智能感知
“感知”是机器人一切行为的基础。特斯拉公司因为无人驾驶技术的积累,CV方面具有一定优势。他们利用计算机视觉识别高频特征,让人形机器人能够快速找到最近的充电站。目前只是具备了一定的视觉感知能力。我们知道人型机器人应该和人一样应该具备“视觉、听觉、触觉”,甚至“味觉和嗅觉”的多模态感知能力。毕竟开放不确定的环境,只有感知能力强了,才能与环境和人类实现和谐共融。
(2)智能交互
人型机器人想进入社会,成为产品为人类提供服务,智能交互是必不可少的。在宣讲后的记者交流会上,也有问及是否考虑集成自然语言交互技术,马斯克也说到未来会考虑这方面。至少目前Optimus机器人状态还不算有智能交互的能力。反而欧洲iCub机器人通过长期的研发,这方面技术在不断进步。
(3)智能操作
瑞典皇家科学院院士 Kragic教授曾发表Science论文指出灵巧操作是机器人研究最具挑战问题之一。Optimus机器人为能快速实现拟人操作,设计了基于穿戴式示教的操作学习方法。通过捕获人体操作的关键帧,并将其映射到机器人上,以此解决机器人在抓取物体时手应该放在哪里,如何进行搬运放置等操作。
智能操作是体现机器人服务的实力水平,也是未来能否真正走进家庭、办公室等场景的关键。从Optimus机器人目前水准来看,应该任重道远。不过挑战对于大家都是一样的,这也给了我国人型机器人发展的好机会。毕竟,对于“阿童木”、“海尔兄弟”、“变形金刚”等机器人,人类还是充满憧憬的。
虽然Optimus机器人现有的技术水平应该还属于二流,但是毕竟马斯克的执行力和超强的研发组织管理能力,对未来这个领域的推动应该还是有效果的。毕竟社会老龄化的趋势愈发严重,都希望能有大众消费得起的人型机器人进入社会,填补人口劳动力的缺失,让大家的生活都能过得从容一点吧....
来源:CAAI认知系统与信息处理专委会
