
【WRC · 资讯】重要突破!大连理工大学团队实现「线驱动连续型机器人多模态感知」登国际权威期刊
你知道什么是连续型机器人吗?这类机器人可以称得上是机器人中的“眼镜蛇”,以其强悍的灵活性和柔顺性著称。它们在医疗介入手术、狭小空间检测、工业及生活辅助等非结构化环境中具有十分广泛的应用场景。
例如图1中,用于微创手术的达芬奇Vinci SP介入手术机器人、美国Tesla公司的蛇形充电机器人以及德国Festo公司的柔性机械臂等。
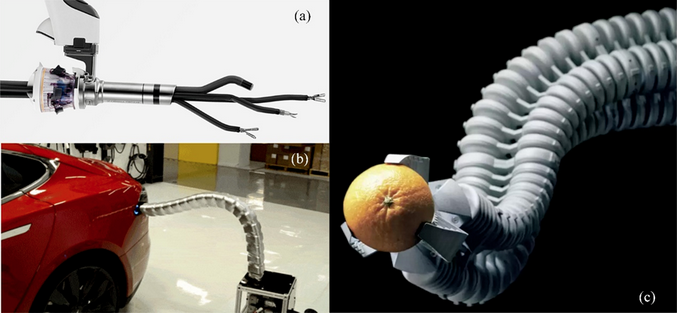
图1. 连续型机器人实例:(a) VinciSP介入手术机器人;(b) Tesla公司的蛇形充电机器人;(c) Festo公司的柔性机械臂。
那么问题来了,同是机器人,为什么它们这么灵活?原因在于连续型机器人通过颠覆传统刚性机械臂的结构设计,使得自身具备大量冗余“自由度”,进而实现灵活运动和柔顺变形。
然而,也正是因为存在大量冗余“自由度”,使得对连续型机器人的感知带来巨大挑战!目前,各种感知手段,包括:视觉运动捕捉、拉力传感器、光纤光栅测量、磁场分布测量等等,都难以通过单一途径实现对连续型机器人的多种运动模态的同步感知,这也严重影响并制约连续型机器人在非结构化环境中的未来发展和实际应用。
针对这些问题,近日,大连理工大学的彭海军教授团队从线(又称绳索或肌腱)驱动的动力学机理出发,提出了一种线驱动连续型机器人的多模态感知方法,即在仅使用线驱动长度数据的条件下,实现了连续型机器人动态位形、张力分布以及驱动状态的多模态同步感知功能。该项研究成果以《Morphology and Tension Perception of Cable-Driven Continuum Robots》为题,在线发表于国际权威期刊《IEEE/ASME Transactions on Mechatronics》,如图2。
图2 在线发表论文截图
▍困难在哪里?
从力学角度来看,线驱动连续型机器人多模态感知就是线驱动长度变化在弹性变形和滑动摩擦等各种非线性因素作用下,如何准确获取连续型机器人的外在动态行为变化以及内在张力分布变化等多种模态信息。
目前,外部视觉测量,可以轻松获取连续型机器人的动态行为,但无法直接获取内在张力分布;拉力传感器,可以方便测量连续型机器人拉线一端的张力大小,但不能代表整个线长度方向的内力分布;光纤光栅更是存在变形误差的累积问题,等等。
这些感知设备和手段仅在单一模态感知方面都存在一些困难,因此研发团队做出大胆试想,不使用视觉测量设备,是否可以实现动态行为变化的感知?不使用拉力传感器,是否可以实现线驱动张力分布的感知?甚至是否可以实现动态行为变化,内在张力分布,甚至驱动状态等等这些多模态信息的同步感知呢?
▍如何实现?
多模态信息其实早已蕴含在线驱动连续型机器人的动力学模型中,只是暂时被表面极度复杂的动力学模型所掩盖罢了,需要一双“慧眼”去发觉多模态信息的宝藏。
彭海军教授团队建立了包含线驱动变形、摩擦和松弛等非线性因素的连续型机器人动力学模型,通过深刻领悟和理解动力学模型的曼妙之美,最终破解了多模态信息同步感知的科学问题。
在这项研究工作中,他们首先发现了驱动线长度的运动学变量与内在张力分布的动力学变量之间的非线性互补关系,根据已知线驱动长度感知线长度方向张力分布,同时感知驱动线的张紧或松弛状态;
然后在所建立的刚柔耦合动力学模型中引入已知张力分布,进而感知外在动态行为变化;最终在仅适用驱动线长度信息的情况下,实现连续型机器人的动态位形、张力分布以及驱动状态的多模态同步感知功能。如图3.
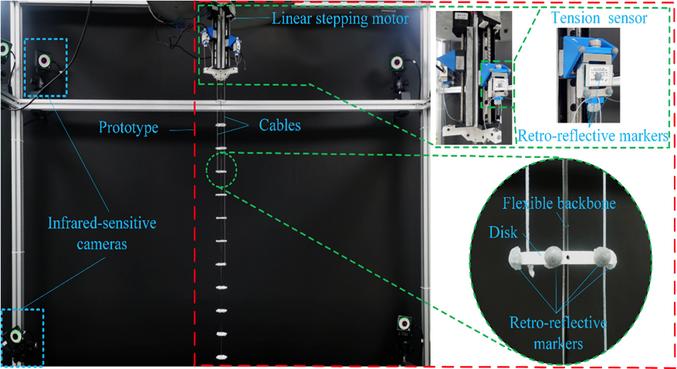
图3 线驱动连续型机器人样机和多模态感知验证系统
▍效果怎么样?
平台搭建完毕后,研究人员们开始了线驱动连续型机器人多模态感知效果实验,他们先分别进行了2根线驱动和3根线驱动,连续型机器人样机完成转动、弯曲和扭转动作,并根据驱动线长度变化感知形态变化,基本与样机视频一致,如gif动图1所示。
GIF动画1
然后在同样的线驱动情况下,根据同样的驱动线长度感知张力和驱动状态,并与张力传感器测量数据进行对比,可以发现感知张力与测量张力吻合度较好,如gif动图2所示
GIF动画2
最后,除了感知连续型机器人的自由运动,还可以在连续型机器人受到外载荷作用下,感知形态、张力和驱动状态,也都和测量结果具有很好的匹配效果,如gif动图3所示。
GIF动画3
▍未来应用潜力
这项研究工作表明:通过连续型机器人的动力学模型,研究团队可以在不使用其他感知设备的条件下,仅使用线驱动长度数据即可实现动态位形、张力分布及驱动状态的多模态同步感知。
这不仅为连续型机器人的精确控制提供了大量反馈信息,还解决了现有各种感知设备仅能单一模态感知,无法多模态同步感知的困难,更是大大降低连续型机器人对感知设备的依赖。
使得在狭小空间等非结构化环境中,无法安装外部测量设备以及不增加自身额外设备的情况下,准确获取多模态信息。因此我们看到,多模态感知技术使得连续型机器人在未来更多实际需求场景中发挥更大价值。
论文信息:
Morphology and Tension Perception of Cable-Driven Continuum Robots
Zhongzhen Liu, Zhiqin Cai*, Haijun Peng*, Xingang Zhang, Zhigang Wu
IEEE/ASME TRANSACTIONS ON MECHATRONICS
DOI:10.1109/TMECH.2022.3198093
https://ieeexplore.ieee.org/abstract/document/9882181
(来源:机器人大讲堂)
