











化工行业巡智能检解决方案
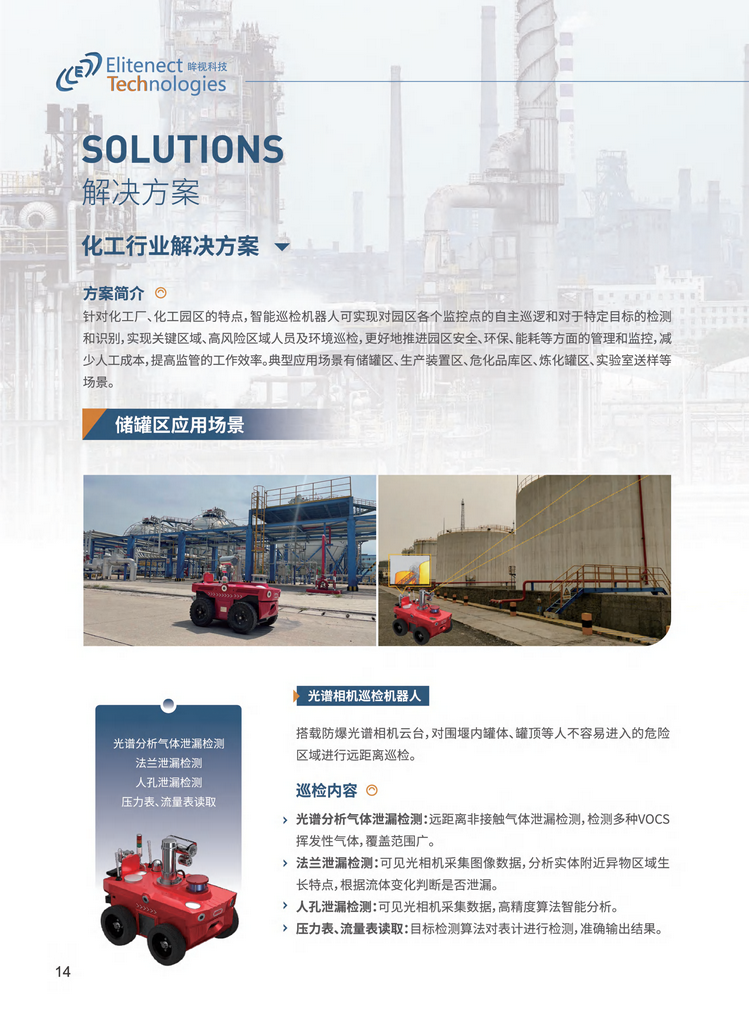
一、储罐区应用场景:
搭载防爆光谱相机云台,对围堰内罐体、罐顶等人不容易进入的危险区域进行远距离巡检。
巡检内容 :
光谱分析气体泄漏检测:远距离非接触气体泄漏检测,检测多种VOCS挥发性气体,覆盖范围广。
法兰泄漏检测:可见光相机采集图像数据,分析法兰附近异物区域生长特点,根据流体变化判断是否泄漏。
人孔泄漏检测:可见光相机采集数据,使用高精度算法智能检测人孔泄漏。
压力表、流量表读取:目标检测算法对表计进行检测,准确输出结果。
二、氟化氢生产装置区应用场景:
采用轻量、耐腐蚀的铝合金轨道,通过地面立杆支架及悬吊安装的方式,安装固定于装置区内,机器人通过RFID+里程计方式导航定位行走,对氟化氢装置区管道、阀门等重点区域进行泄漏检测识别。
巡检内容 :
氟化氢气体泄漏检测:氟化氢有强腐蚀性,在管道阀门等重点区域,机器人通过吸入式气体传感器监测氟化氢的泄漏情况,如出现异常,系统报警提醒运维人员处理。
管道测温:通过红外热成像仪,及时发现异常温度区域,自动保存测温数据,形成历史分析曲线和多样化的分析报表,便于运维人员进行诊断分析。
仪表读数:可见光相机采集仪表图像数据,通过机器视觉算法识别表计读数,并根据示数判断异常情况。
音频采集分析:机器人本体搭载高灵敏度拾音器进行声纹采集,通过声音识别技术,减轻环境噪音干扰,增强音频信息识别的准确性和可靠性,实现故障设备检测与定位
三、危化品库区应用场景:
搭载防爆可见光相机、红外热成像仪和气体传感仪对化学库环境及设备自主检测,及时发现高温、泄露隐患。
巡检内容 :
货架变形检测:机器人通过前端的深度视觉摄像头,通过算法计算,识别铅锤指示位置是否位于地面绿色刻度区域中,判断货架是否变形。
温度检测:机器人通过红外热图像+可见光图像的校正分析,判断危化品是否超温并及时报警。
泄漏检测:可见光相机采集图像数据,分析实体附近异物区域生长特点,根据流体变化判断是否泄漏。
视频直播:机器人携带可见光和红外热成像摄像机,通过无线网络将视频实时回传到监控室。
四、炼化(烯烃厂、炼油厂)应用场景:
多传感器融合自主导航定位,搭载防爆光谱相机云台,对烯短厂球罐区进行泄漏检测、表计读取;对炼油厂泵区、常压塔区等进行泵体测温及火炬火源检测。
巡检内容 :
泄漏检测:对球罐区等高危险源区域,机器人通过光谱相机进行远距离、大范围的非接触式气体泄漏检测。
表计读取:自动识别指针表、数字表等、通过卷积神经网络算法计算出仪表示数并自动输出示数的物理含义。
泵体测温:机器人通过红外热像仪对泵体、电机等进行温度测量,超过设定阈值,及时告警。
火源检测:对火炬火源燃烧情况进行识别判断。
