










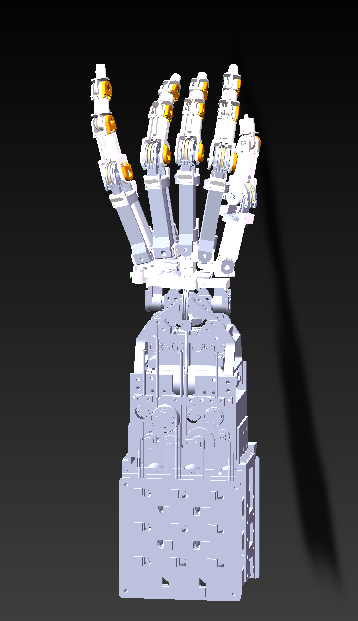
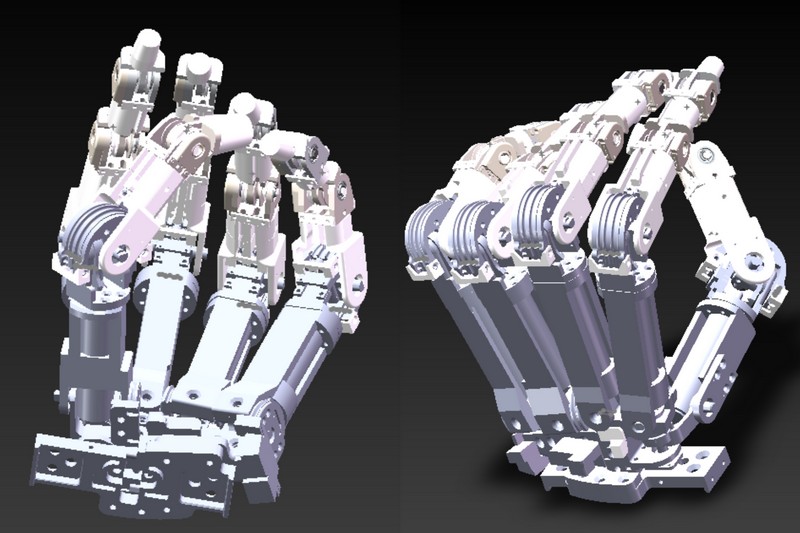
工业级25自由度灵巧手
产品亮点:赋能机器人灵巧操作、认知导航、灵活移动、自主决策等技术突破



展品介绍
忆海原识最新研发的工业级高性能灵巧手结合独创类脑智能技术体系,解决机器人的灵巧操作、认知导航、灵活移动、自主决策等难题,适合用于操作型机器人、实验室自动化、生产线自动化、危险环境作业、科教平台等广阔的科研、生产、生活领域。
产品优势
高可靠、易维护、易定制;
通用模块化设计,克服“一种工况要求,一次重新设计”的问题;
完全自主知识产权,可全面国产;
快速推广自动化、无人化的智能场景。
产品特性
灵巧性:五指型灵巧手,能做抓、握、夹、捏等全部人手能够做的操作;
可定制:可定制手指数量;自由度数量可定制12至32个;其力量范围可定制2Kg到30Kg;可定制皮肤、外壳,达到刚柔并济、防水防尘效果;
兼容性:可适配位置传感器、纹理传感器、触觉传感器、力和力矩传感器,可以安装在指端,也可以安装在手掌各处;提供机械安装接口以及SDK,便于二次开发集成;
控制模式:程控、遥控、示教(操作员示范以后机器人即可自动完成操作)、类脑控制。
自主研发
本产品已布局的专利涵盖领域包括多自由度仿生灵巧手、拮抗式驱动装置、腱传动系统、腱传动关节模块、关节驱动装置等机械结构专利,以及控制系统专利如机器人多级控制系统、灵巧手控制系统、驱动电路模组等。
已获得的主要专利:
申请号为CN2019112141681,专利名称为《32自由度仿生柔顺内骨骼灵巧手》的国内发明专利;
申请号为CN2021106179975,专利名称为《二自由度正交腱传动关节模块》的国内发明专利;等等。
