











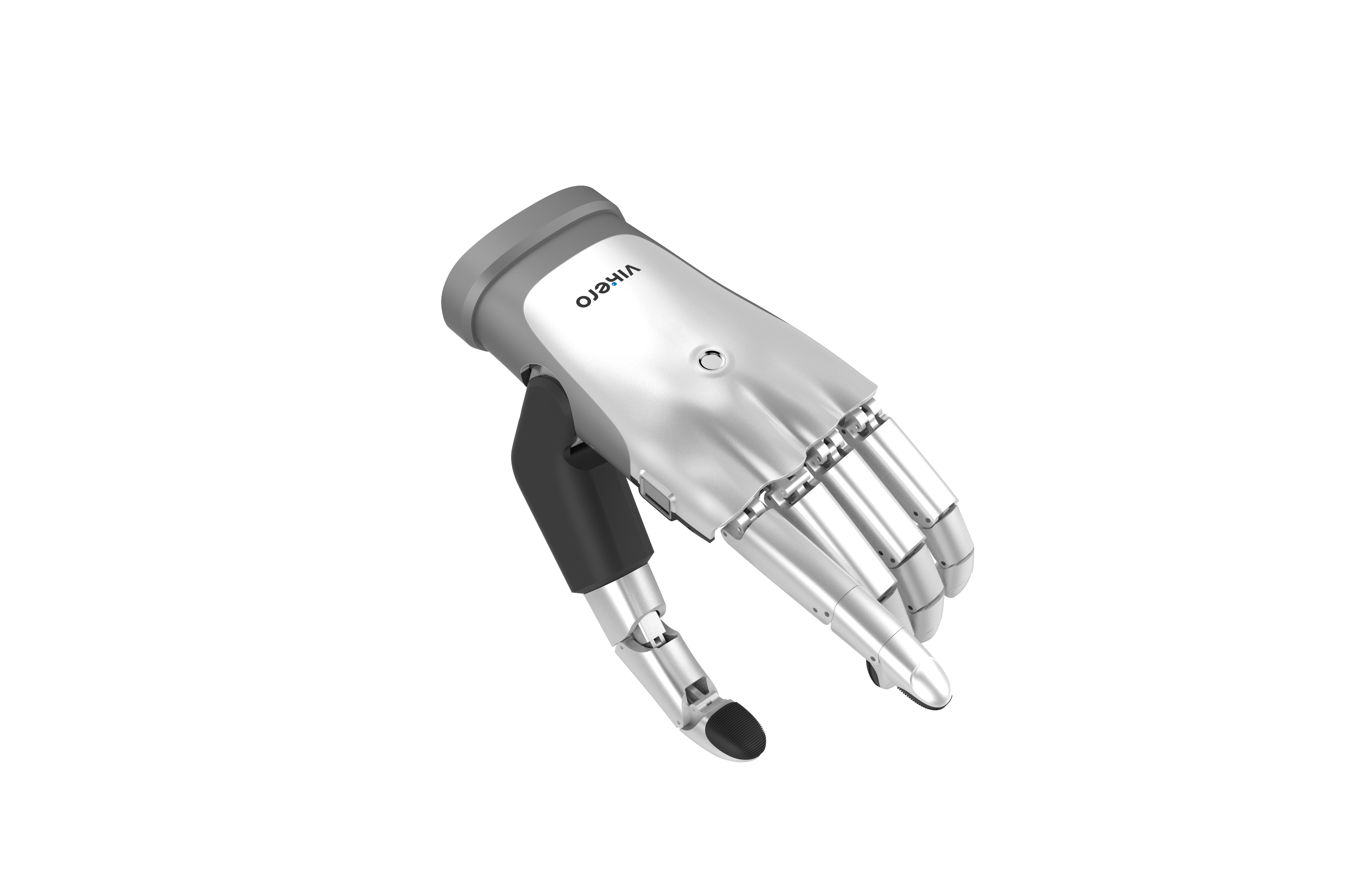
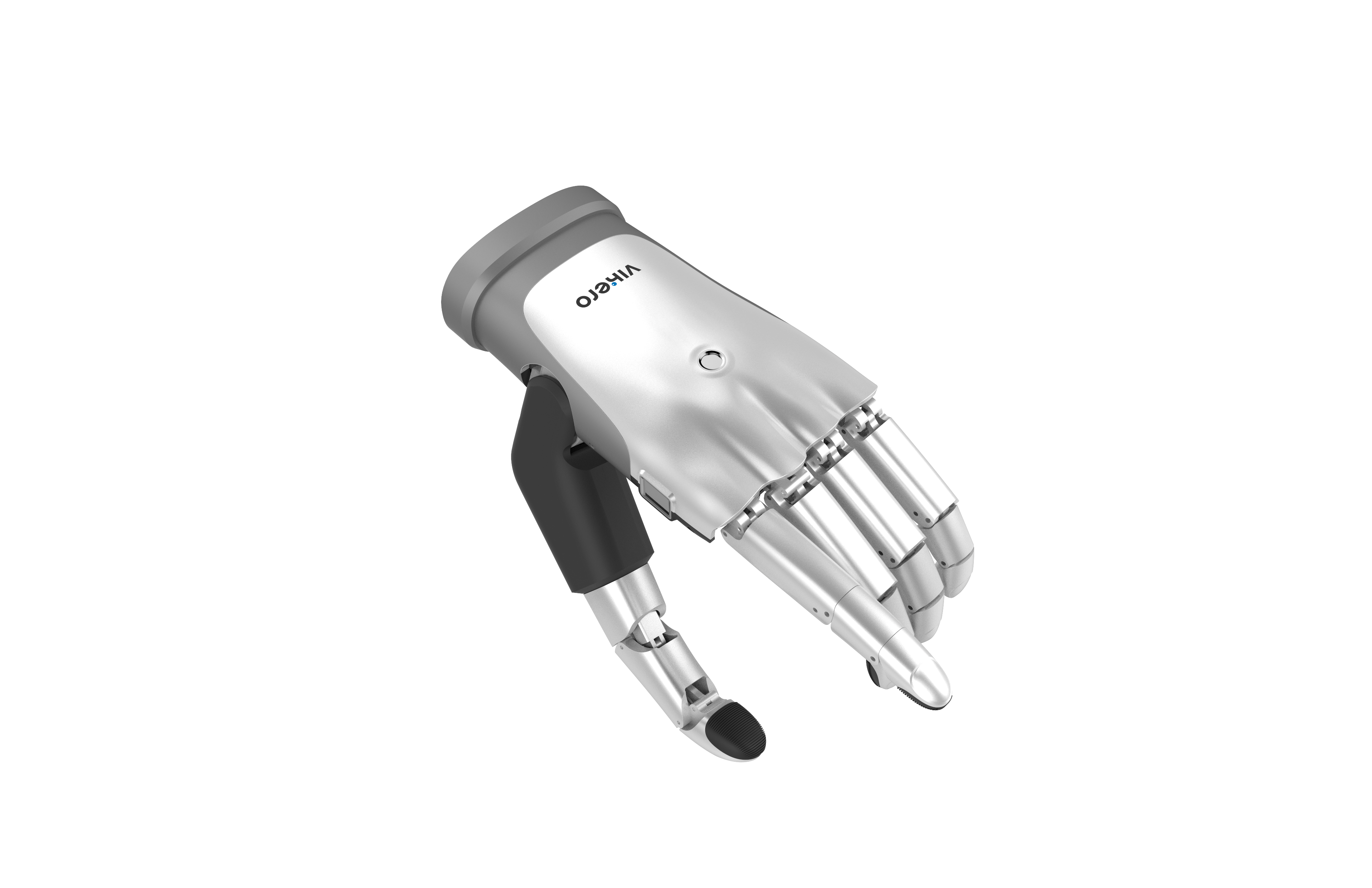
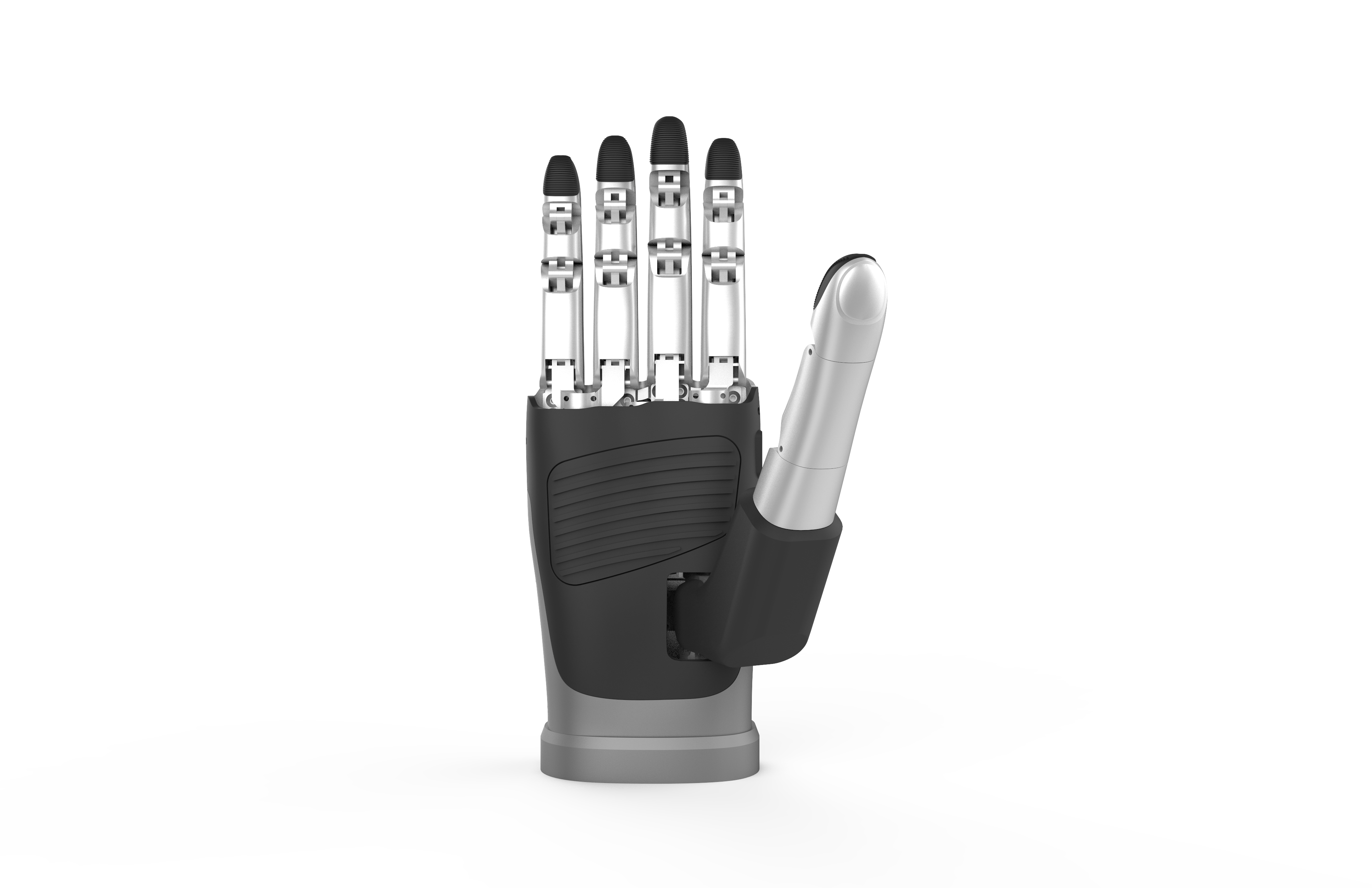
新一代智能人形手
产品亮点:自由灵活,稳固抓握;适应变化,智能抓握;手眼伺服,协同作业


展品介绍
伟景机器人灵巧手按照真实人手1:1设计,具有9个自由度和18个手部关节,高度模拟真实人体手部结构,可完成各种复杂抓握动作和手势展示。控制系统采用先进的电流反馈控制方法,可根据物品的材质和重量智能调节抓力的大小,单指指尖压力可达8N。伟景机器人灵巧手和伟景立体视觉智能系统集成后,可通过手部装配的2个手眼伺服的Mark点实时跟踪、调整手掌的空间位置和移动路径,实现各种复杂环境下的物品的取放和搬移。
